The performance of the particle filters depends on samples drawn from the importance sampling step and, as a result, a good selection of the importance density is required. The optimal sampling strategy in terms of minimizing the variance of the importance weights is to draw samples from the distribution of interest. However, the distribution of interest is not known or very difficult to draw samples from in most of the real world state estimation problems. In addition, solving the integral in the importance weights is either impossible or takes significant computational resources. To this end, an alternative distribution, which is called importance density is selected to draw samples from. A good selection of the importance density is the key for (1) less degeneracy problems and reduced resampling instances, (2) faster convergence, (3) reduced computational complexity, and (4) better estimation accuracy. Therefore, in this study, we proposed a novel importance density selection scheme for particle filtering based on the minimum relative entropy principle and Taylor series expansion theorem. The performance of the particle filtering algorithm that embed our proposed minimum relative entropy based density selection scheme is successfully demonstrated for short-term electricity demand forecasting of a company located in Miami, Florida.
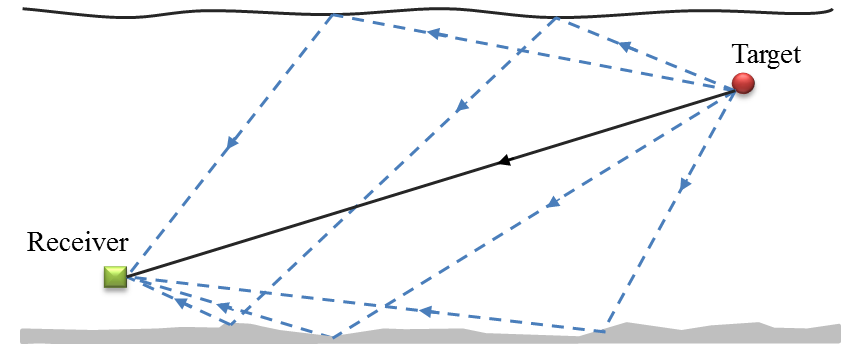
Target tracking is one of the most popular real-world state estimation problems of the large-scale dynamic systems. In order to detect a target location or track its trajectory, a radar is always used, which emits signals in predetermined directions and frequencies through its transmitter. While originally developed to satisfy the needs of the military for surveillance and weapon control, radar systems have been applied to various fields such as air traffic control for safe travelling, remote sensing for meteorological precipitation monitoring, and geological observations, amongst many others. Yet, all of these applications rely significantly on high precision, and thus necessitate a tracking mechanism that is capable of extracting objects from high noise levels and complex multipath interference, both of which frequently occur over the ocean surface. However, achieving accurate estimation of a target’s state, especially in low elevation over the sea surface, is not a trivial task due to three main issues:
Complex real-world situations (unstable sea-surface state, various noises, etc.) generate great difficulties in investigation and implementation of signal processing techniques, which are essential to any radar system.
Transmitted waveform may vary momentously in terms of its characteristics (i.e., amplitude, frequency, signal-to-noise ratio, etc.), hindering the determination of the most suitable waveform type to be used in the radar system.
Radar tracking over the sea surface suffers from the multipath interference. The impact of multipath propagation may depend on various factors, and all these factors are multifaceted and fuzzy, making the problem even more complicated.
(Multipath Propagation over the Sea Surface)
(Operations of the Proposed Particle Filtering Algorithm)
Particle filtering algorithm is heavily studied for state estimation problems. However, to the best of our knowledge, it has not been widely applied to the area of optimization, especially for solving multi-objective optimization problems. From this perspective, in this study, we propose a modified particle filtering algorithm with an efficient sampling procedure for the multi-objective optimization problems.
The proposed algorithm is composed of two major steps, namely, importance sampling step and resampling step. In the step of importance sampling, a set of particles are sequentially drawn from the solution space based on the performance of the particle set at prior iterations and their importance weights in terms of their performances on the objectives are assigned. In the resampling step, a performance-based selection procedure (PSP) is carried out. This proposed procedure originates from the idea that the optima will be achieved if one of the alternatives is selected amongst all the possible solutions and the probability that the selected alternative is really the “best” is controlled at each iteration. Here, the proposed PSP procedure is equipped with two iterative steps: 1) generate candidate solutions from a sampling distribution with a modified particle filtering algorithm; 2) select the alternatives with “good” performances and update the sampling distribution using the selected candidate solutions for the next iteration. Last but not least, in order to draw samples efficiently and achieve the optima without taking considerable computational efforts, an optimal computing budget allocation (OCBA) procedure is incorporated in the proposed algorithm.
 (Multipath Propagation over the Sea Surface)
(Multipath Propagation over the Sea Surface)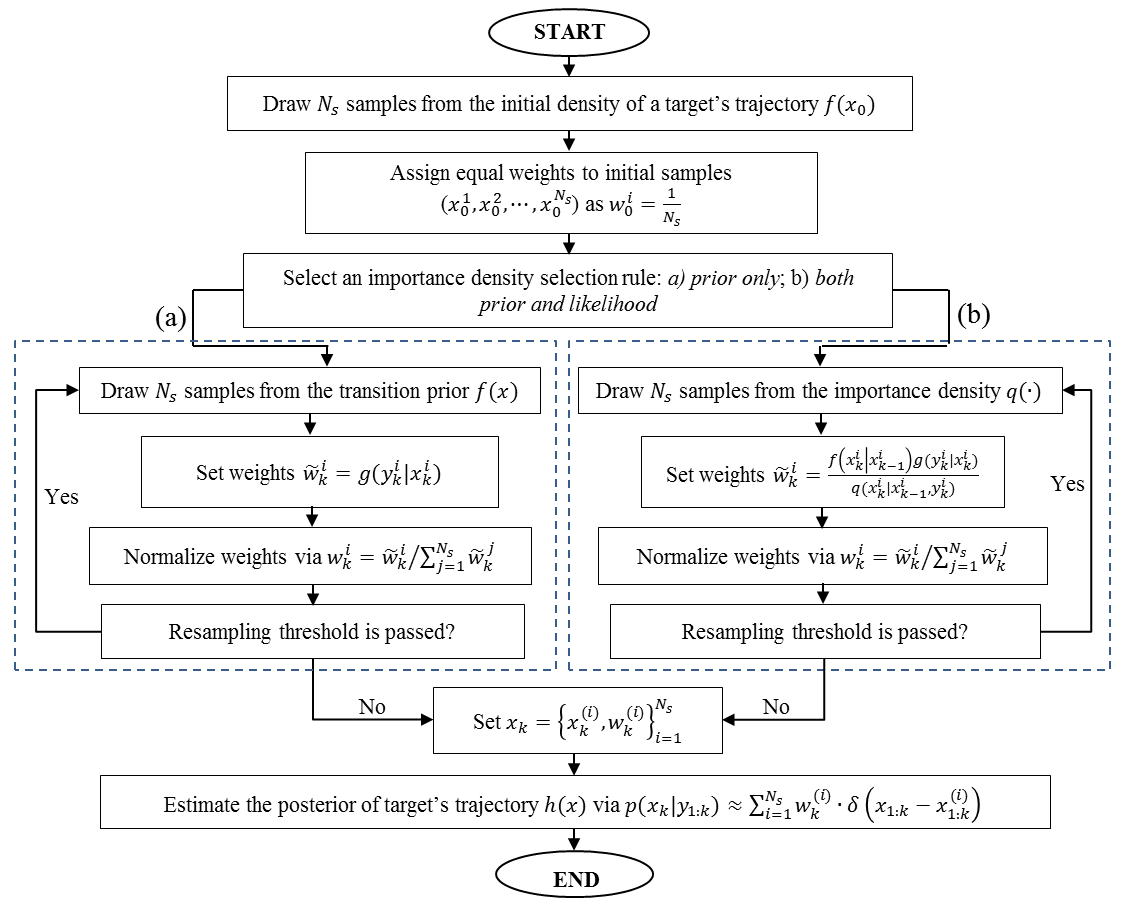 (Operations of the Proposed Particle Filtering Algorithm)
(Operations of the Proposed Particle Filtering Algorithm)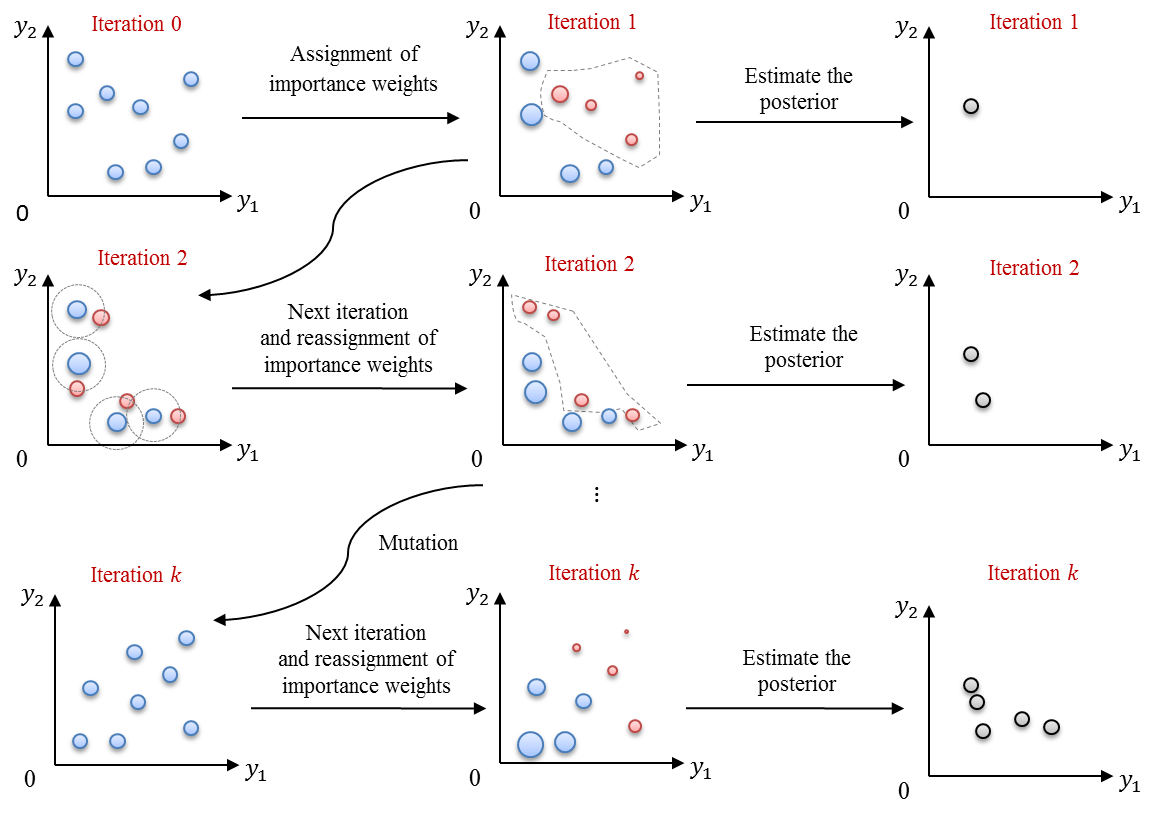 (Proposed Particle Filtering-based Optimization Algorithm)
(Proposed Particle Filtering-based Optimization Algorithm)